YET Architecture
Aeolian Robot
AADRL Master Thesis — London, UK, 2021–2023
Data
Credits
About the Project
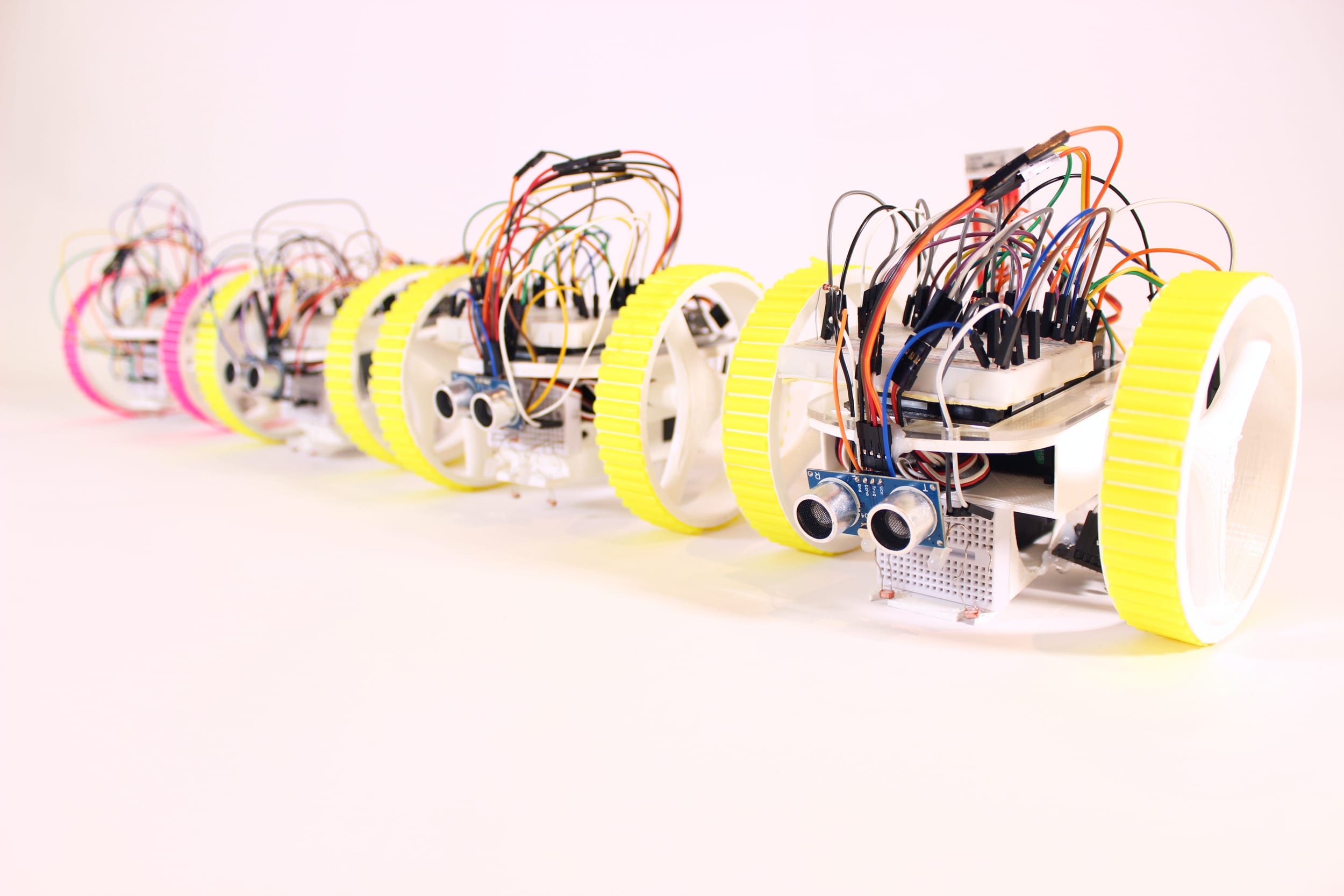
The process of physical prototyping of agents behaviour was conducted along the research. The goal was to exhibit communicative agent behaviour, following the proposed strategy for terraformation of a desert.
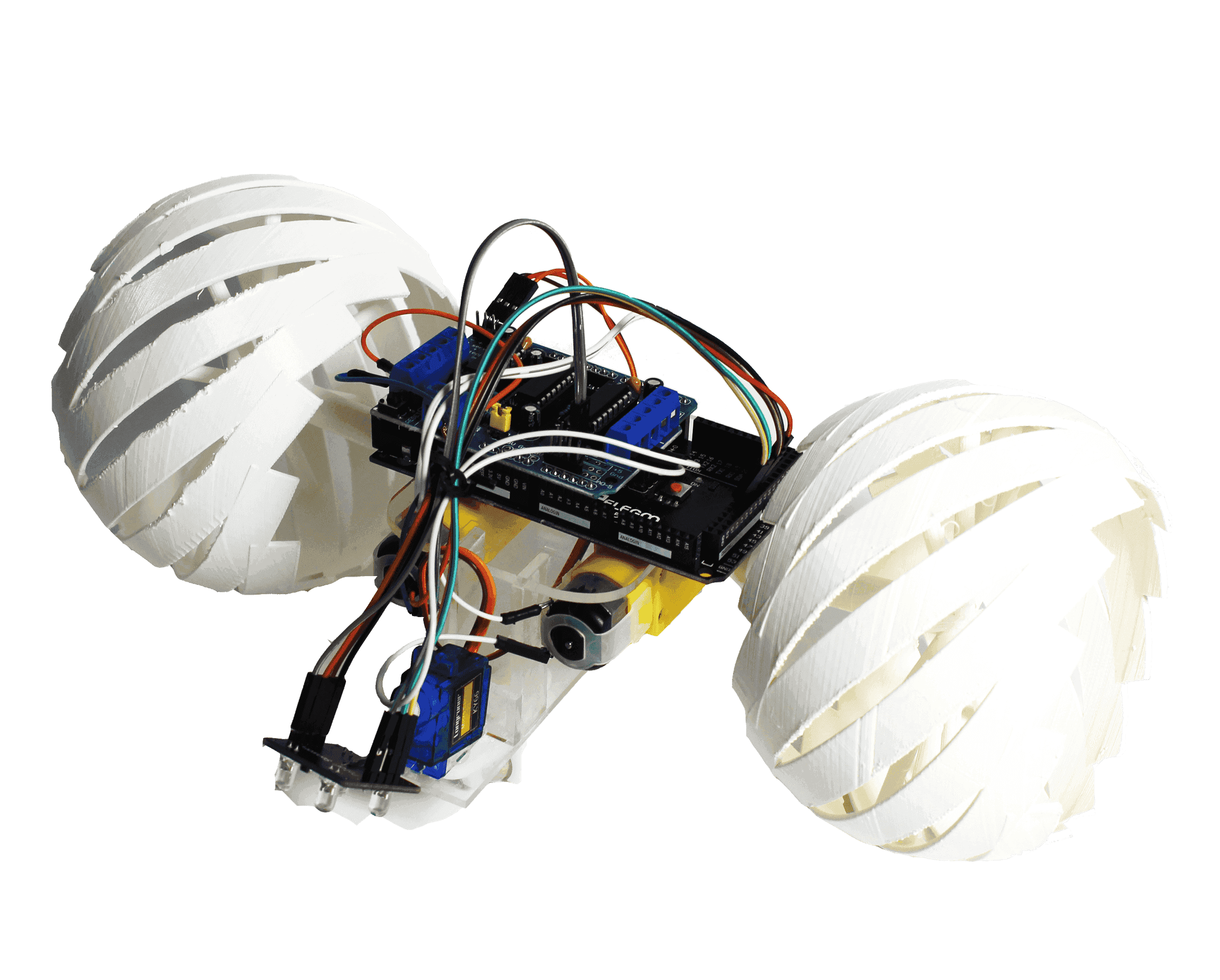
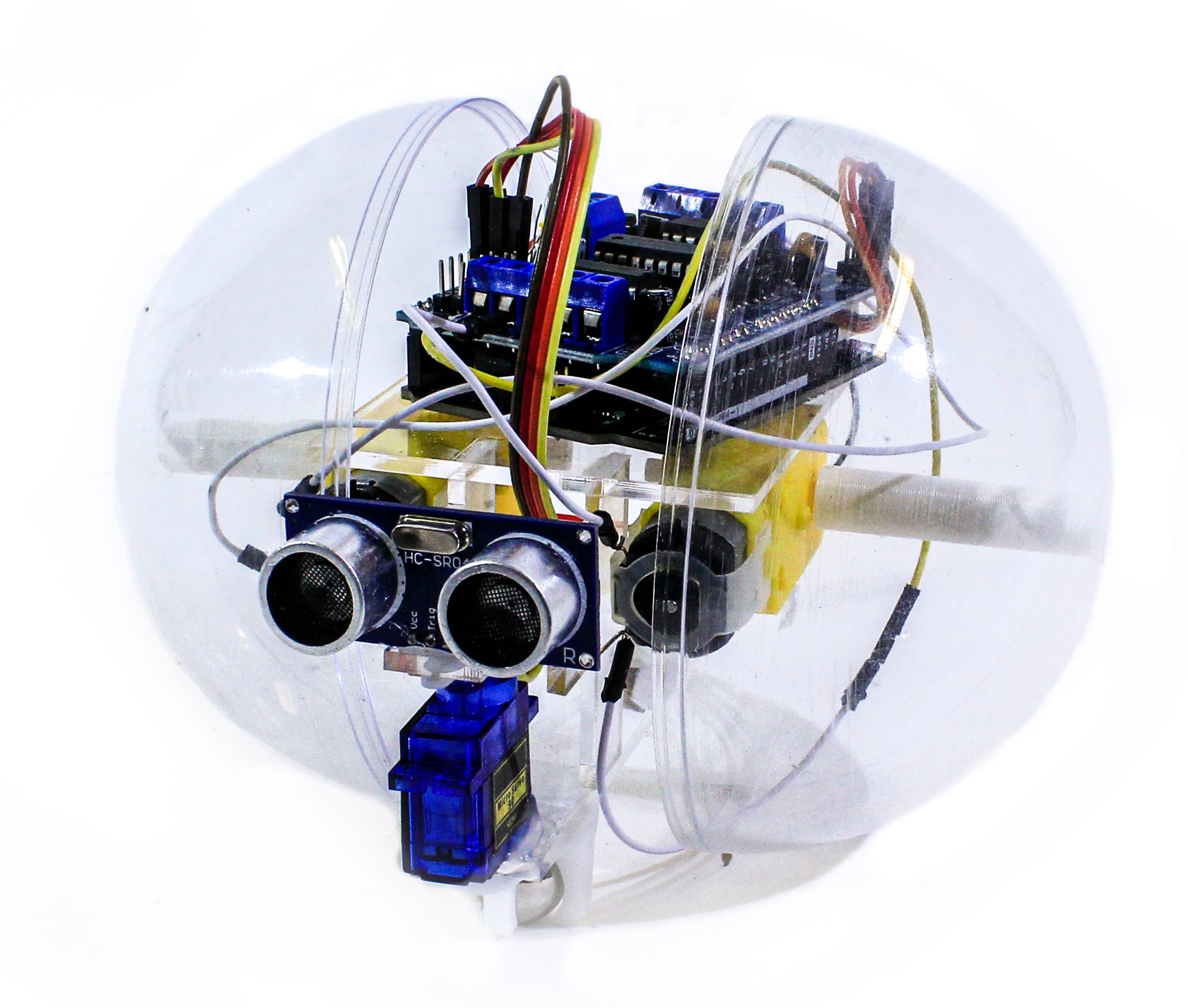
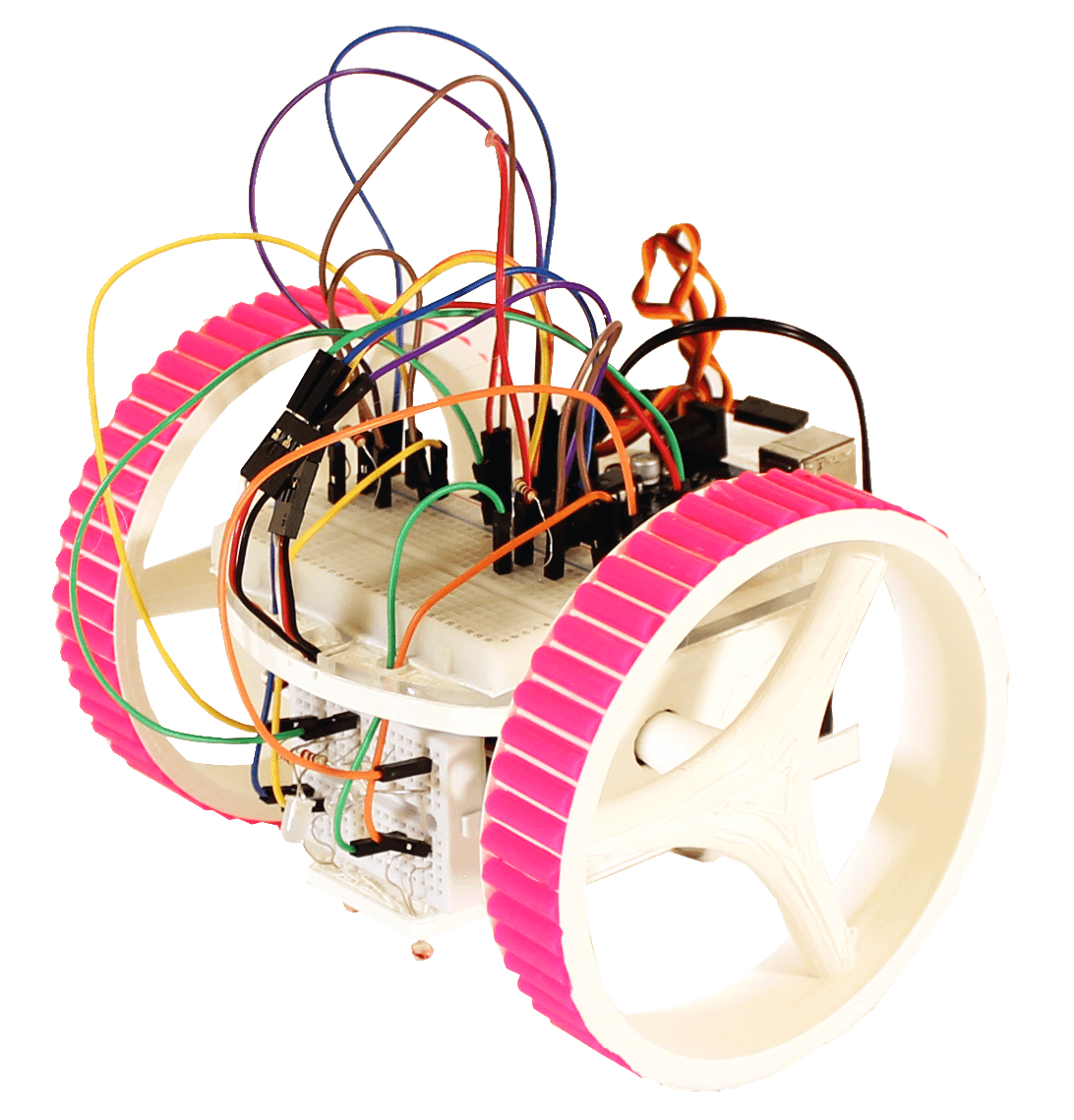
The first iteration of attempts explored variations of wheels for bots to move in desert. Second step was to explore variations in sensors input data for robots to react to the context. The first one used was the with distant ultrasonic sensor to avoid obstacles.
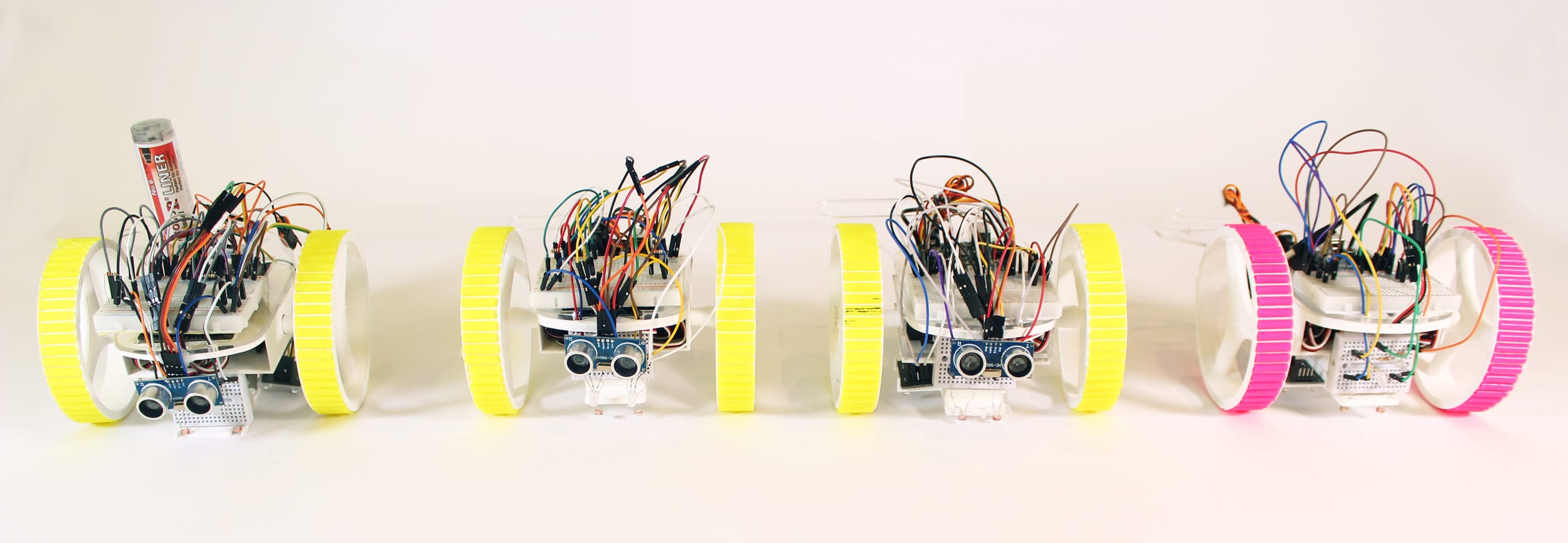
Aeolian Series
The global goal is to enable agents to communicate between each other and context. They would communicate through the welded glass they produced.
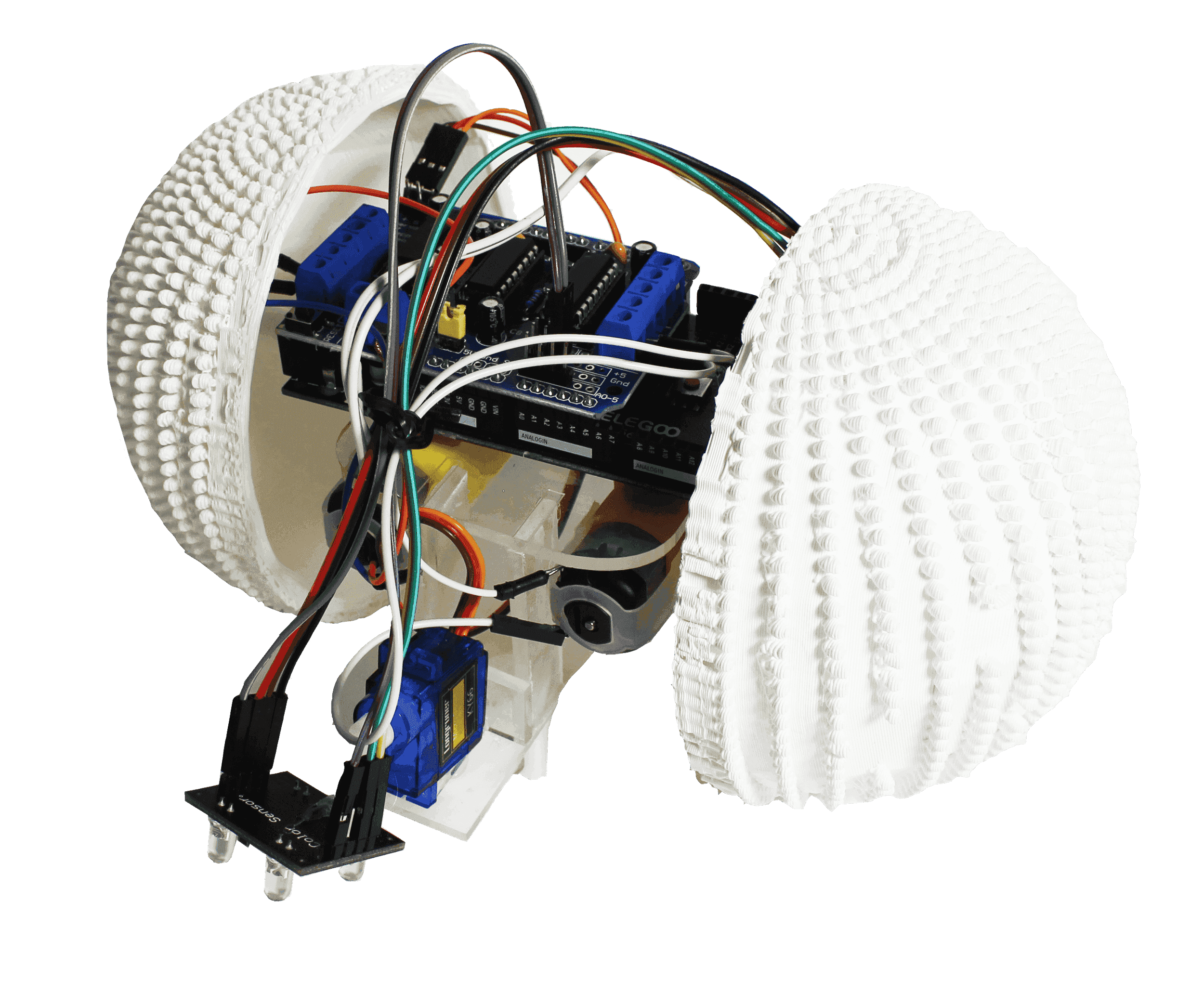
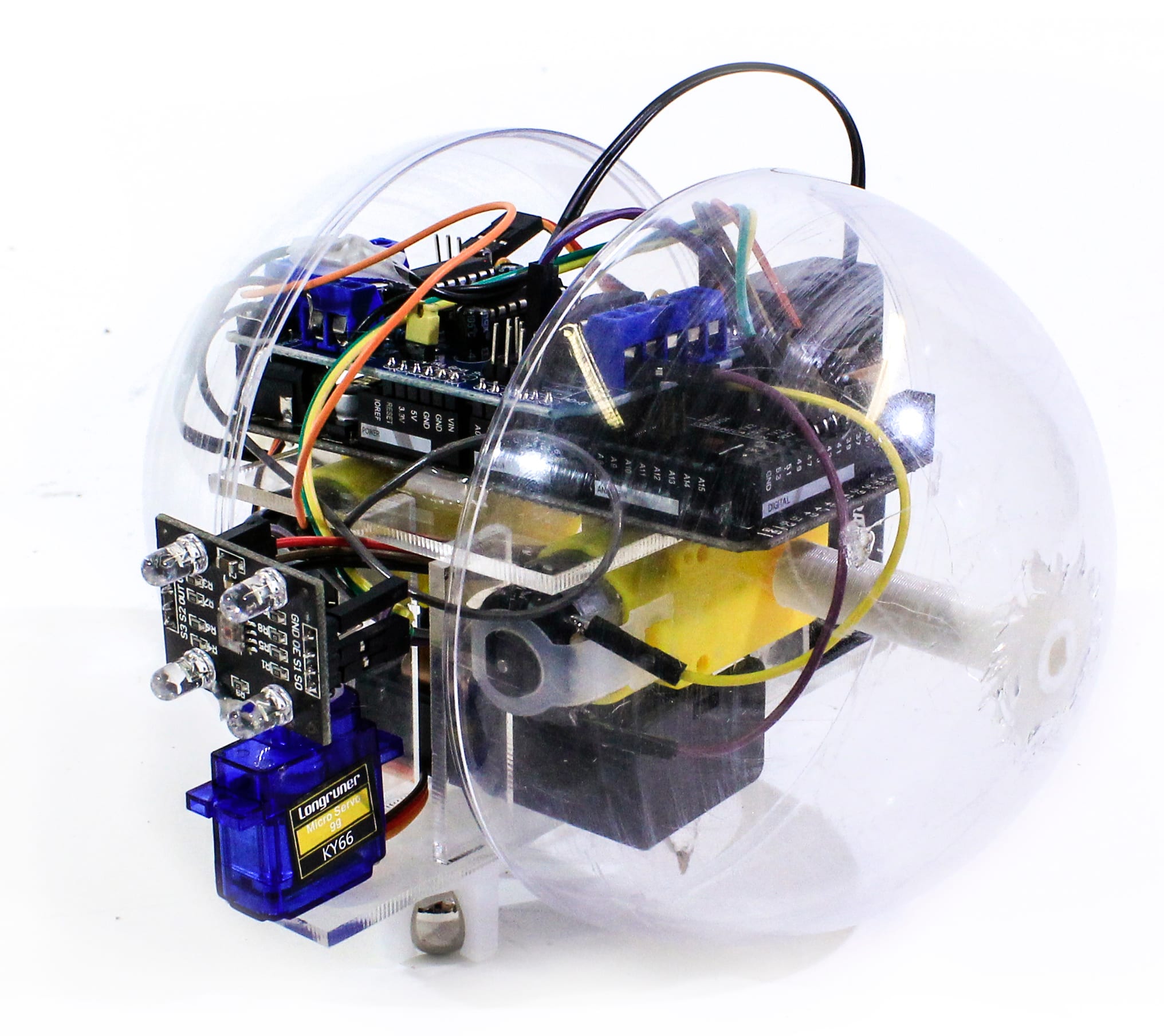
The next goal was to get data from the context and the bot was updated with the ability to sense black/white difference with brightness sensor and to sense color with rgb sensor. This difference would serve as a representation of used parameters to check from the landscape: to sense previous robot trail, variations of landscape and general orientation.
Sand / Glass Differentiation
The aim is to let the bot the ability to sense the difference between sand and glass which another robot had printed.
Sand differs from glass by color, temperature and brightness.
Therefore for the next iterations we employed photoresistors. With photoresistors the bot was able to “see” the difference between light reflection of two materials.
Structuring
Color Sensor

Thermistor
Photoresistor Sensor
Structuring
.jpg)
.jpg)
.jpg)
Sand

.jpg)

Structuring
Color
Temperature
Brightness
Line Drawing — Line Following
As bots are supposed to communicate through the welded glass, the prototype should represented the glass. In our case the bot held a pen and drew a line while moving. The global idea was to develop a system when one bot would draw a line then another one would follow it and draw another line with the offset.
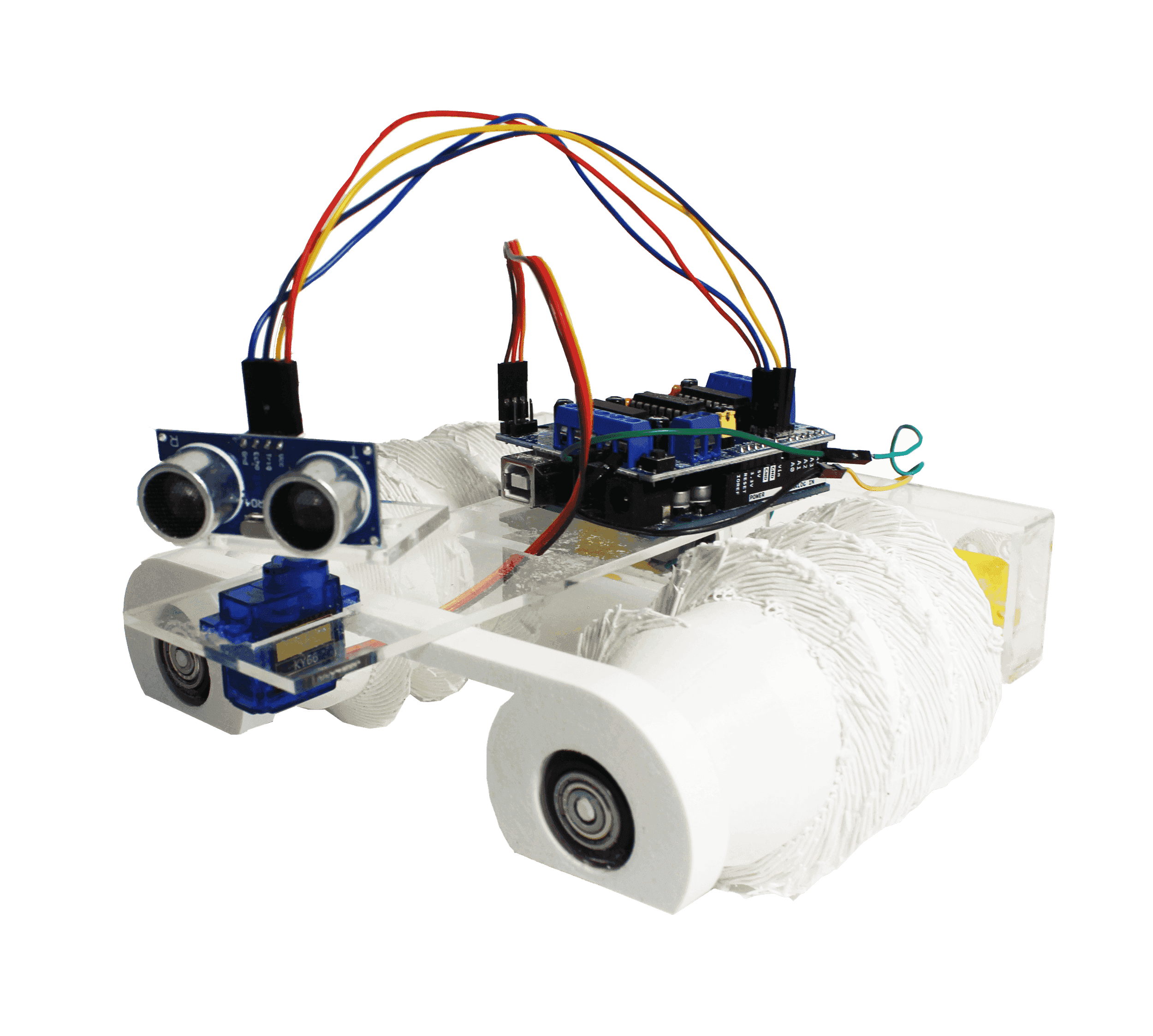
Communication V 1.0
The first attempt for the communication failed by 2 points. The type of initially chosen motors was not suitable. DC motors were not working half of the time and it was not friendly to control. Secondly bots employed rgb sensors to detect the drawn line to follow it.

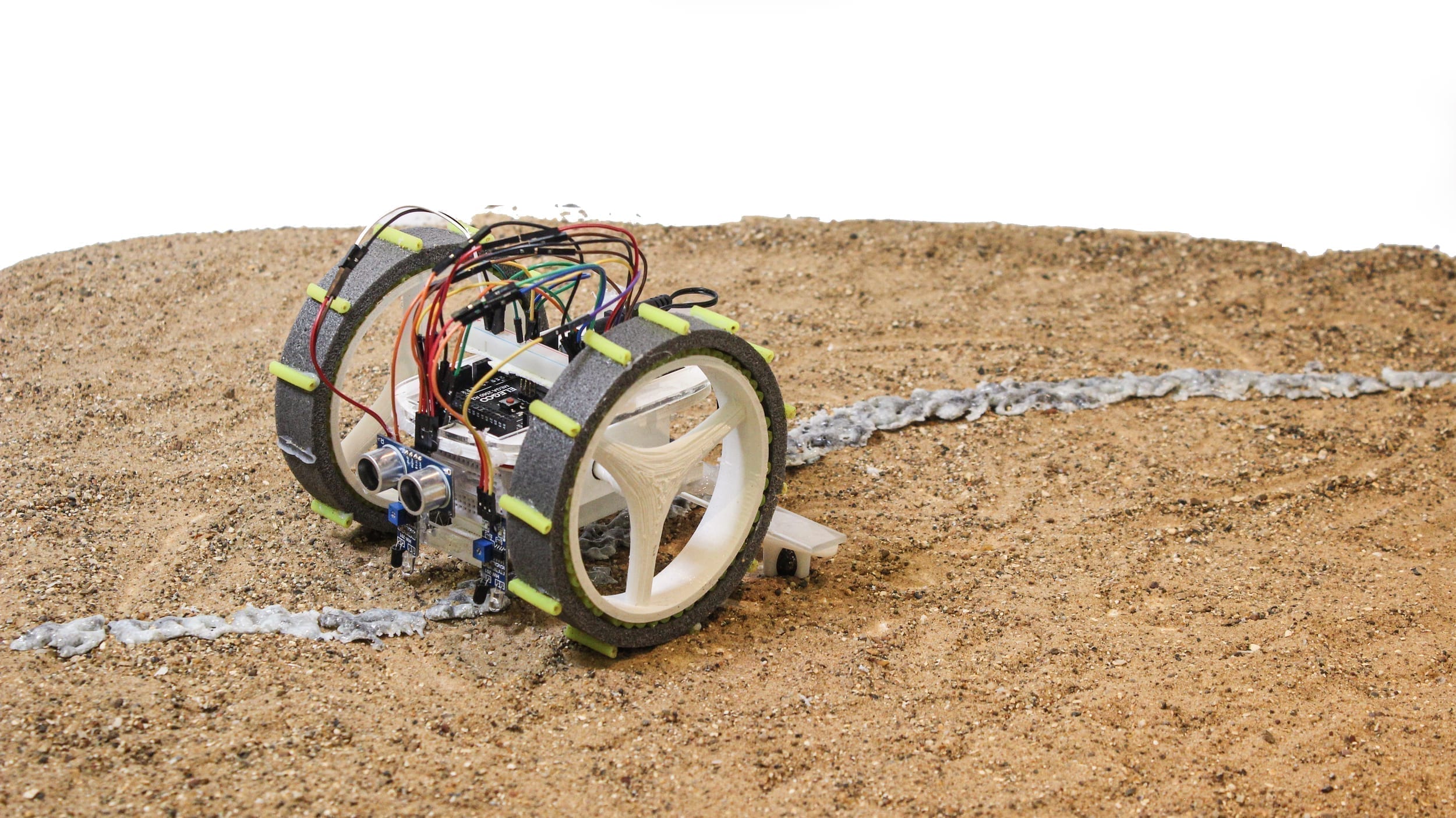
Arduino Agent Prototype V2
After the fail with motors and color sensors the second version employed continuous servo motors and IR sensors instead of photo resistors.
Bots are able to sense the line and offset it, drawing another, new one.
Bots are equipped with ultrasonic sensor which allows it so sense obstacles and do not bump them.
Attempt for collaboration. Bots are communicating through the line, from time to time they do mistakes which brings uncertainty into the patterning.
Clear emerging of stigmerging patterning is visible through the process of bots communication.
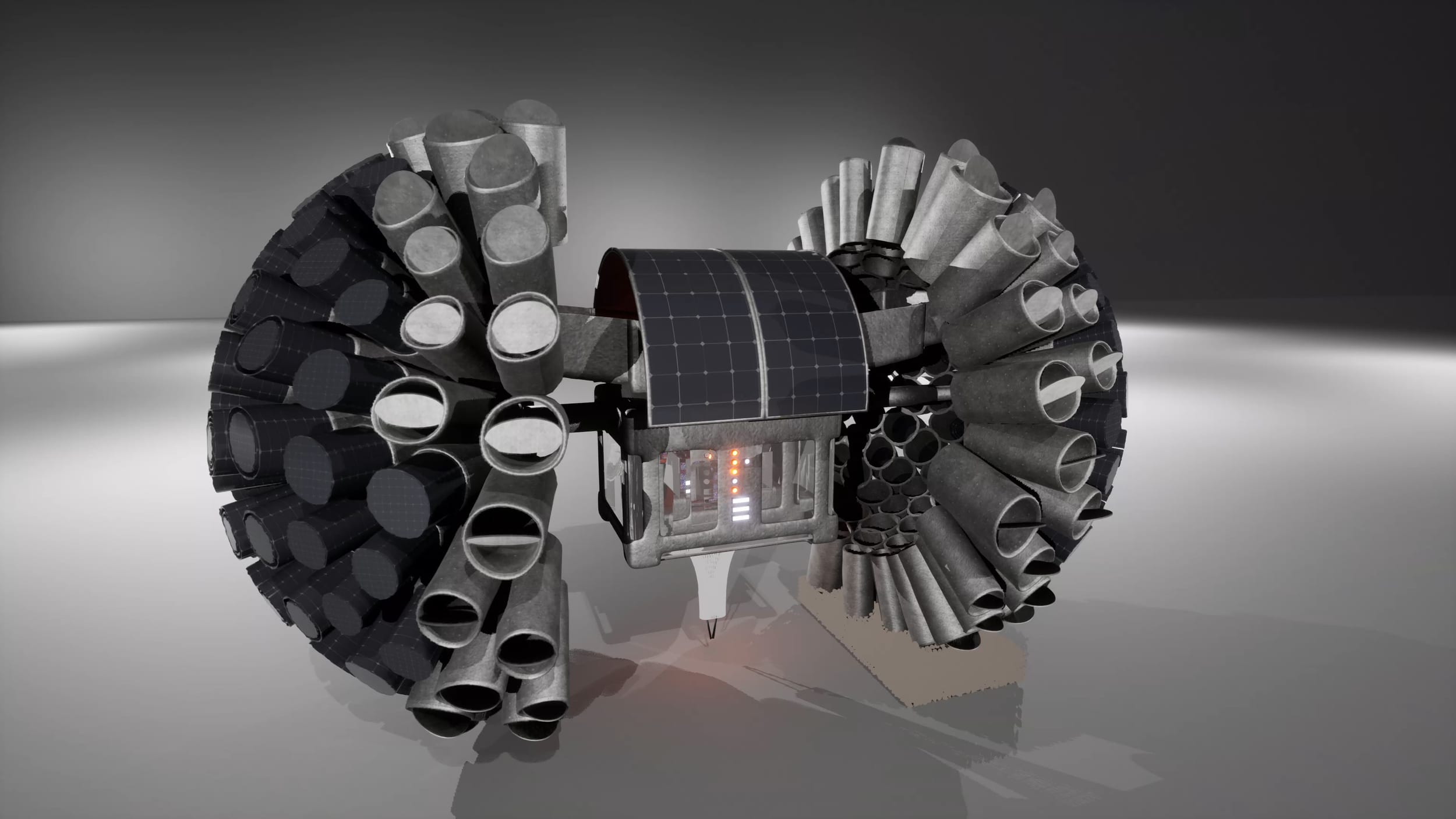

Aeolian Series